Nonlinear Model Predictive Control via Sequential Convex Programming for Drone-to-Drone Docking
Problem
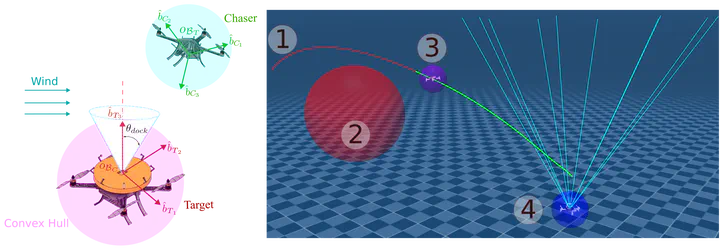
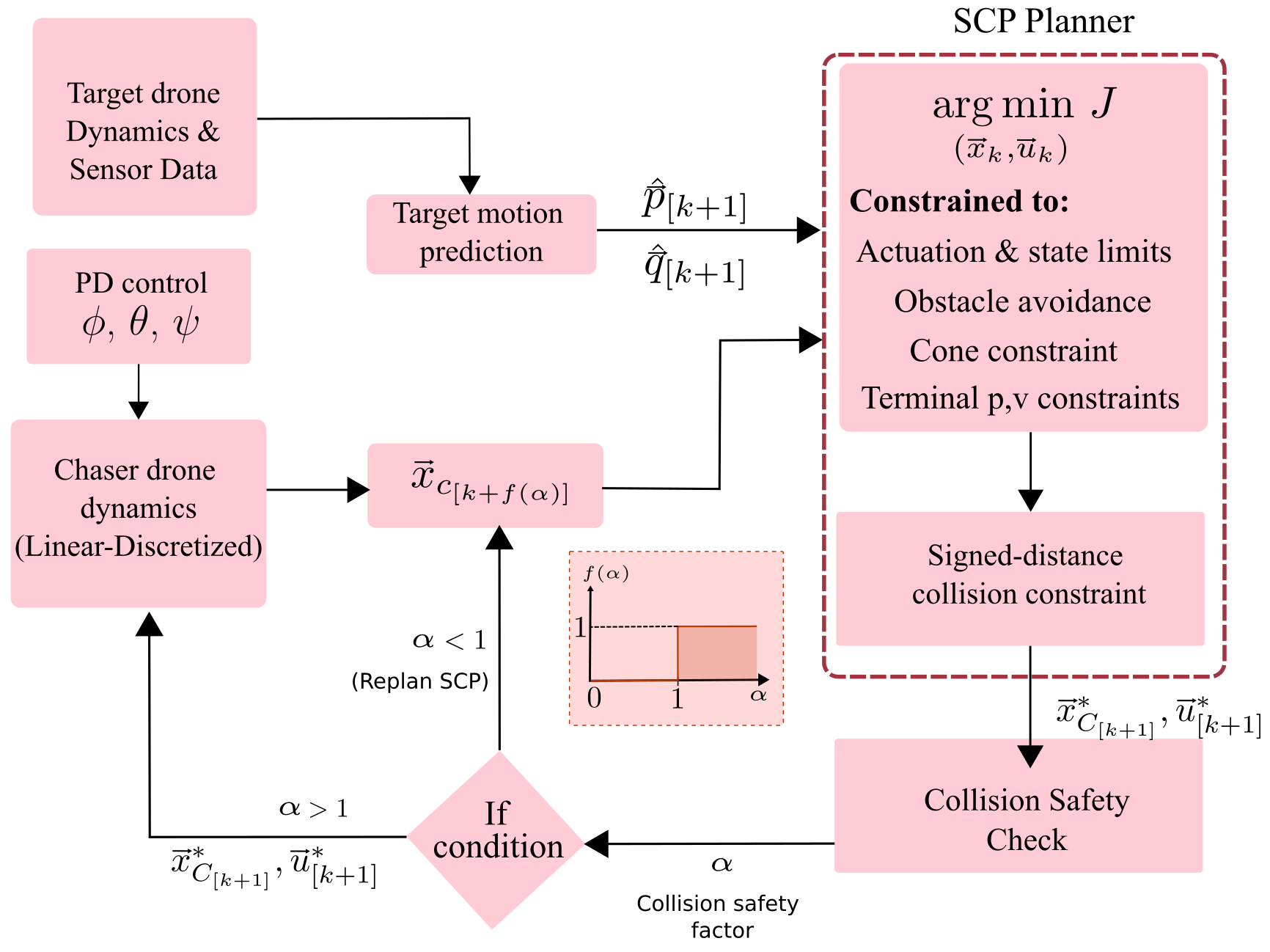
This project develops sequential convex programming formulations for drone-to-drone docking. The focus is on safe, feasible trajectories that respect disturbance bounds and actuator limits while preserving computational tractability.
Approach
- Convexified constraints for safety and docking geometry
- Robust thrust profiles under bounded disturbances
- Numerical validation on docking scenarios