Analytical Model for Soft Robotic Membranes
Problem
This project develops analytical models for tendon-actuated soft membranes inspired by jellyfish propulsion. The goal is to capture dominant deformation and propulsion mechanisms with compact, interpretable models.
Approach
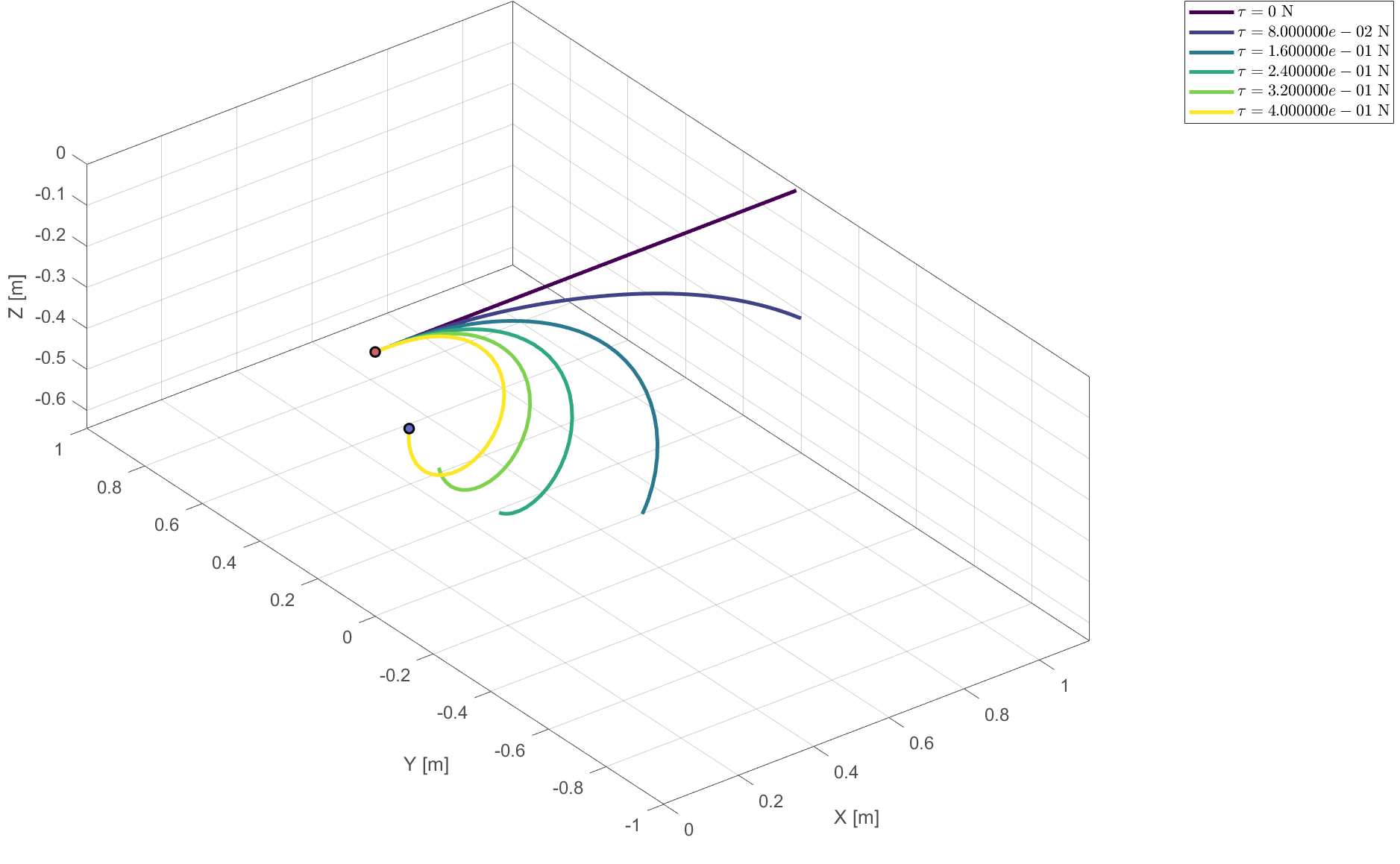
- Cosserat rod modeling of membrane deformation
- Hydrodynamic force estimation via Lighthill’s theory
- Validation using immersed boundary simulations