
Adaptive Trajectory Planning with Sequential Convex Programming for Drone-to-Drone Docking
Sequential convex programming framework for adaptive drone docking.
Jul 7, 1010
On the Use of Gimbal-based Multi-DOF Platform for Hardware-in-Loop Reinforcement Learning for Characterizing the Dynamics of Underactuated Aerial Vehicles
Gimbal-based HIL reinforcement learning platform for underactuated aerial vehicles (in process).
Jul 7, 1010
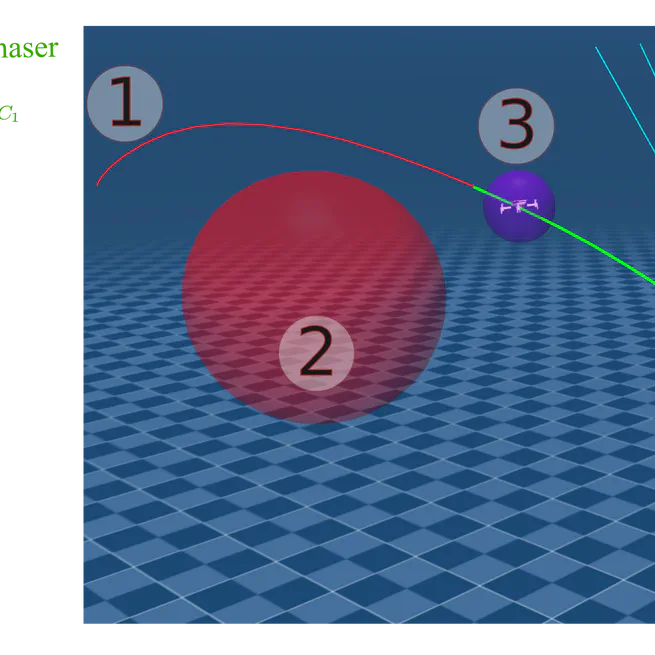
Nonlinear Model Predictive Control via Sequential Convex Programming for Drone-to-Drone Docking
Generated optimal thrust profiles under convexified safety constraints and environmental disturbances.
Jul 7, 11110
Sparus AUV Modelling and Control
Developed a hydrodynamic model and Simulink-based stabilization controller for an underactuated AUV.
Jul 7, 1010